
Case Study
Urrà
Usabilità dei Robot e Riconfigurabilità dei Processi
CONTESTO
Negli ultimi anni lo sviluppo di nuovi robot con raffinate capacità di manipolazione, di visione e di comprensione dell’ambiente circostante sta guidando una nuova rivoluzione industriale. Con l’avvento dell’Industria 4.0, le linee di produzione sono caratterizzate da un rinnovamento costante che punta verso l’automazione e l’intelligenza artificiale.
Il progetto URRÀ ha analizzato le ultime tecnologie relative all’ambito tecnologico della robotica collaborativa e dei Cyber Physical Systems (CPS) e sono state implementate e validate tecniche per la collaborazione uomo robot e per la riconfigurabilità dei processi produttivi, che hanno sistemi CPS direttamente integrati nei Manufacturing Execution System (MES).
L’obiettivo raggiunto dal progetto è stato quello di semplificare l’utilizzo dei robot in ambito industriale, permettendo ai robot di diventare “smart”, in grado cioè di apprendere autonomamente il compito da eseguire e di “prendere decisioni” in base alla situazione produttiva attuale in cui si trovano, e quello di semplificare la loro interconnessione a livello di processi industriali.
Le tecnologie sviluppate in una prima fase di ricerca e sviluppo, sono state quindi implementate in tre diversi casi d’uso presso aziende del territorio.
SVILUPPO, INTEGRAZIONE E VALIDAZIONE IN APPLICAZIONI REALI
Come risultato finale, il progetto ha realizzato dei prototipi industriali con un elevato grado di flessibilità. Tali prototipi hanno dimostrato la fattibilità e l’efficacia delle soluzioni tecnologiche adottate rispetto a soluzioni di automazione classica centralizzate e/o al lavoro manuale di un operatore.

Use case Zannini
SISTEMA ROBOTICO AVANZATO FUNZIONANTE IN MODALITÀ COLLABORATIVA PER LA MANIPOLAZIONE DI COMPONENTI TORNITI
Lo studio ha portato alla messa a punto di una cella di collaudo robotizzata per la misurazione di piccoli pezzi cilindrici di natura metallica eseguita con un robot collaborativo Fanuc, sostituendo l’operatore nel lavoro manuale e ripetitivo di picking. L’automazione del processo, non solo aumenta la qualità del lavoro, ma garantisce un forte aumento della produttività dal momento che un singolo operatore è in grado di gestire più stazioni robotizzate contemporaneamente
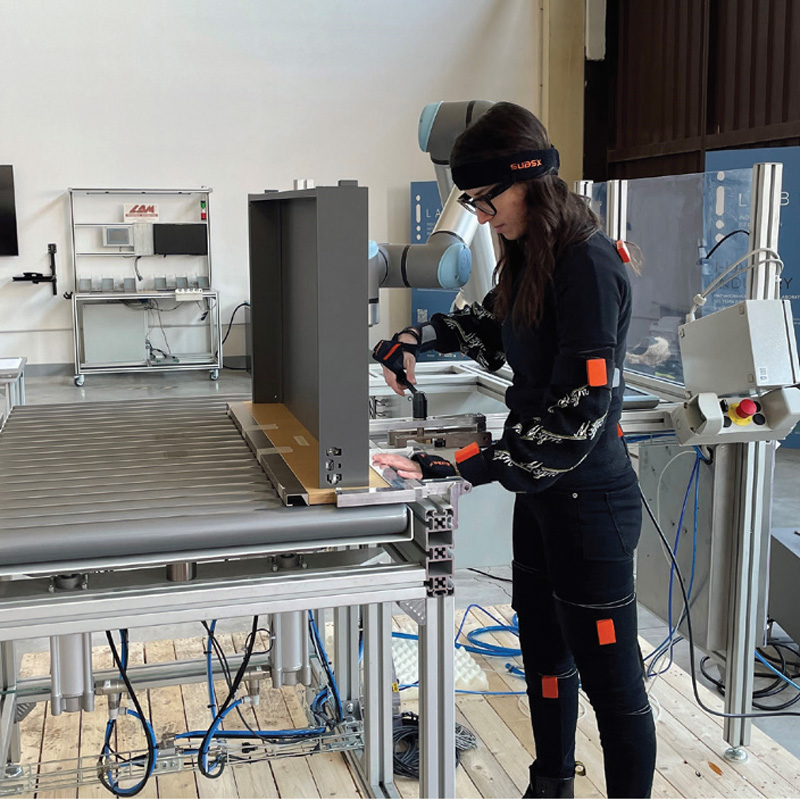
Use case Lube
SISTEMA ROBOTICO COLLABORATIVO PER L’ASSEMBLAGGIO DI MOBILI DA CUCINA
In LUBE sono state prese in esame e sviluppate due applicazioni che prevedono la collaborazione tra operatore e robot. La prima applicazione consiste nello studio e nello sviluppo di un sistema robotico che opera in linea di assemblaggio e supporta l’operatore nelle attività finali di montaggio, registrazione, pulizia e controllo qualità prima dell’imballaggio del mobile. La seconda applicazione ha considerato lo studio, lo sviluppo e la realizzazione di un sistema robotico collaborativo per l’inserimento delle viti sui cassettoni da cucina.

Use case Loccioni
MANIPOLAZIONE AVANZATA DI OGGETTI IN LINEA DI PRODUZIONE
La manipolazione di oggetti diversi fatta in modo automatico da un robot senza informazioni a priori è una delle sfide di questi ultimi anni. Ad oggi, un robot per manipolare degli oggetti deve avere molte informazioni a priori, tipo le sue dimensioni, la sua posizione, il materiale di cui è costituito, ecc. L’obiettivo del progetto e del prototipo sviluppato è stato quello di verificare la fattibilità dell’uso di reti neurali convoluzionali denominate Quality Grasp - Convolutional Neural Networks (GQ-CNNN) che mediante l’immagine 3D dell’oggetto fornisce al robot le coordinate della miglior presa per il robot.