Use case Loccioni
MANIPOLAZIONE AVANZATA DI OGGETTI IN LINEA DI PRODUZIONE
La manipolazione di oggetti diversi fatta in modo automatico da un robot senza informazioni a priori è una delle sfide di questi ultimi anni. Ad oggi, un robot per manipolare degli oggetti deve avere molte informazioni a priori, tipo le sue dimensioni, la sua posizione, il materiale di cui è costituito, ecc.
L’obiettivo del progetto e del prototipo sviluppato è stato quello di verificare la fattibilità dell’uso di reti neurali convoluzionali denominate Quality Grasp - Convolutional Neural Networks (GQ-CNNN) che mediante l’immagine 3D dell’oggetto fornisce al robot le coordinate della miglior presa per il robot.
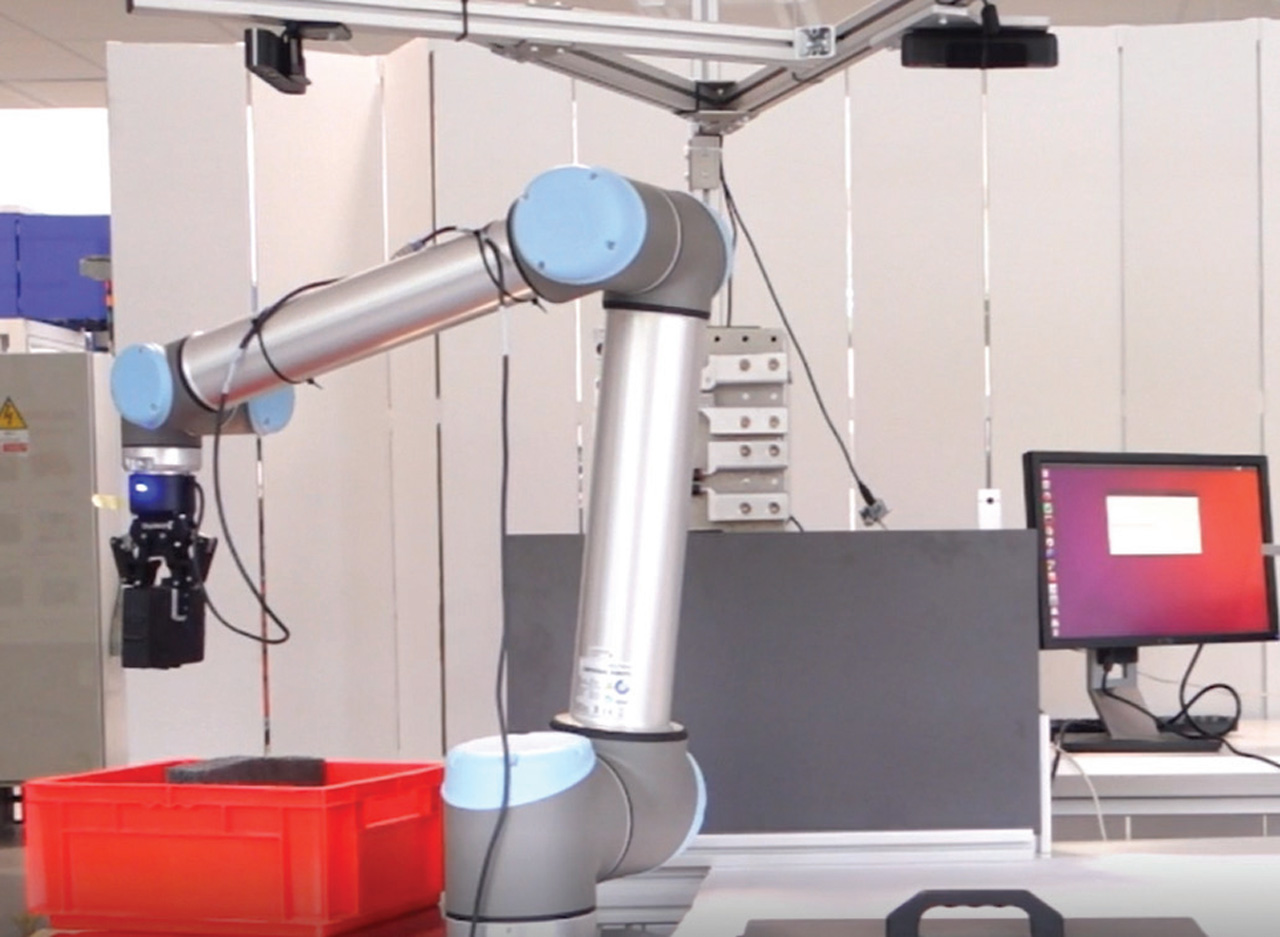
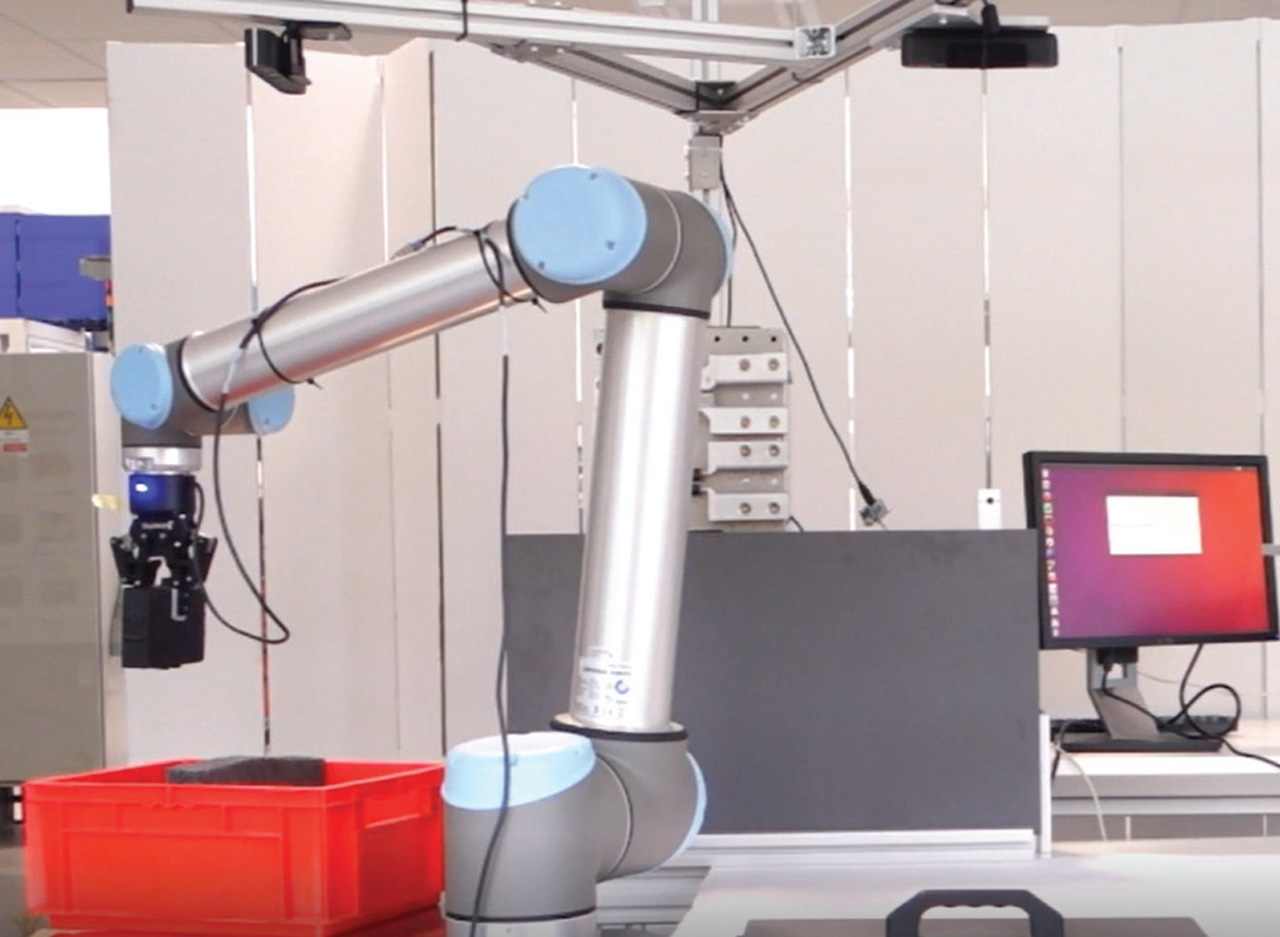
L’applicazione scelta è stata quella della manipolazione di centraline del settore automotive che devono essere prese da una scatola dove vengono messe a fine linea per essere posizionate in un’altra scatola per la spedizione al cliente finale. L’applicazione è adatta a testare le funzionalità della GQ-CNNN in quanto ci sono molti tipi di centraline e l’aggiornamento del programma robot che deve essere fatto per la manipolazione è abbastanza gravosa, in quanto richiede il lavoro di personale competente.
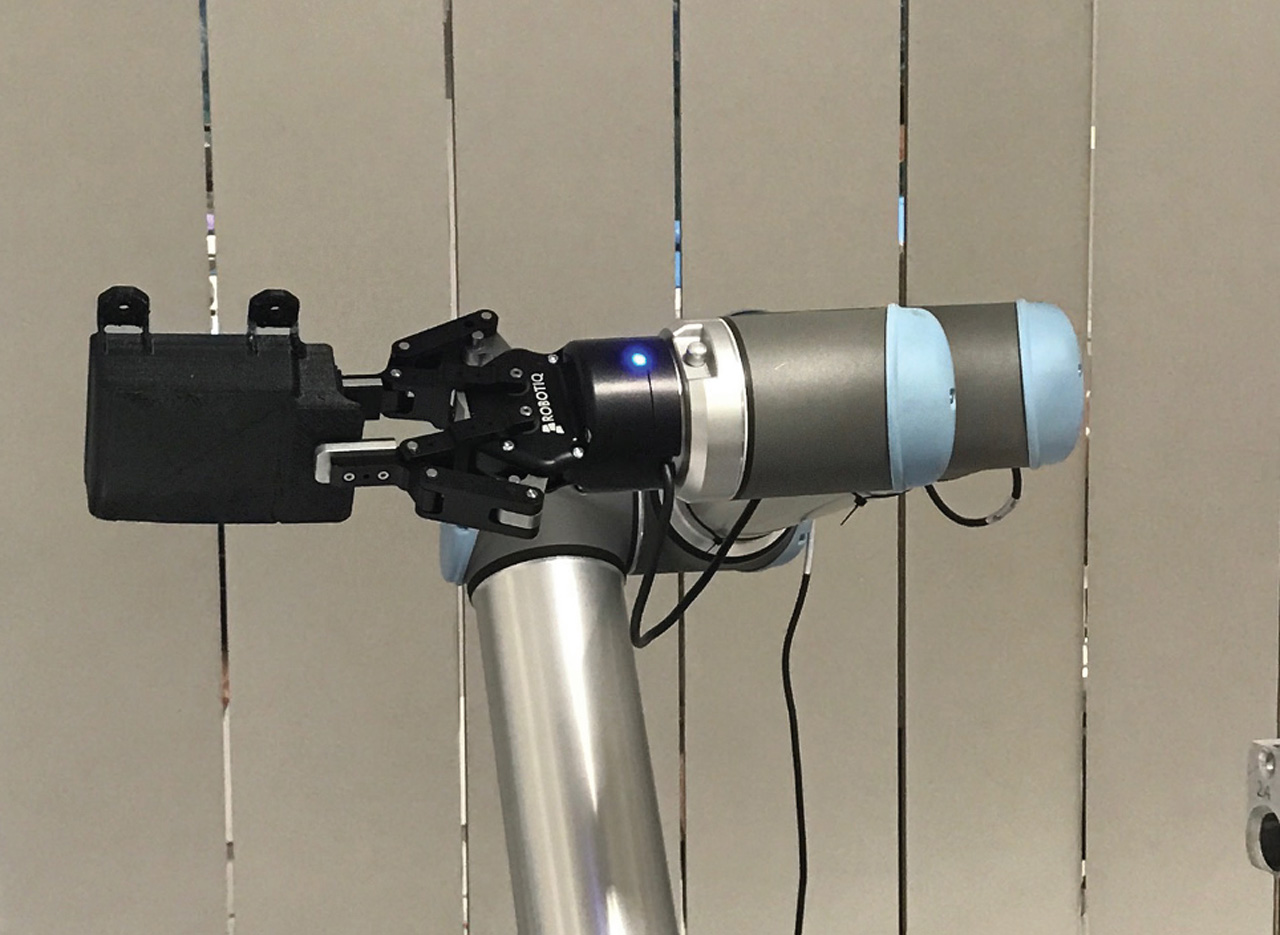
In particolare, si sono studiati nuovi algoritmi e utilizzati sensori innovativi utilizzati in combinazione con robot al fine di conferire al robot quelle caratteristiche cognitive che saranno necessarie al fine di adattarsi ad una produzione flessibile e non ripetitiva. La complessità degli algoritmi è ancora elevata e il progetto ha dato quindi la possibilità di comprendere meglio le potenzialità dell’Intelligenza Artificiale, delle sue necessità in termini di hardware necessario per farla funzionare e soprattutto delle competenze necessarie per saperla utilizzare.